
Overview
This project involves the design, manufacturing, and flight testing of a robotic landing gear (RLG) concept for rotorcraft. In collaboration with Boeing, the RLG system is being developed for a ~400lb Unmanned Aerial Vehicle. Through this project the team developed a novel four-bar cable-driven leg mechanism as well as novel ground contact sensors based on rubber encapsulated pressure sensors. The RLG system was successfully flight tested in March 2018.
Currently, we are working on research towards commercialization of RLG. We have worked on an Air Force Phase I STTR (completed), and are working on an Army Phase I SBIR (ongoing) and Air Force Phase II STTR (ongoing).

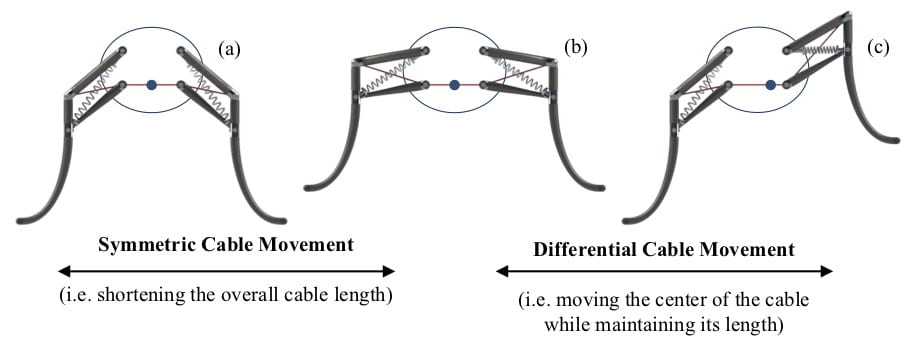
As part of this effort, a novel cable-driven four-bar link leg mechanism was developed. The mechanism is based on a four-bar linkage which is driven by a cable connecting pin joints at opposite diagonal corners. Particular structural and kinematic benefits are achieved when two such mechanisms are joined. The mechanism has been demonstrated in prototypes and tested for structural crashworthiness through full-scale drop testing.

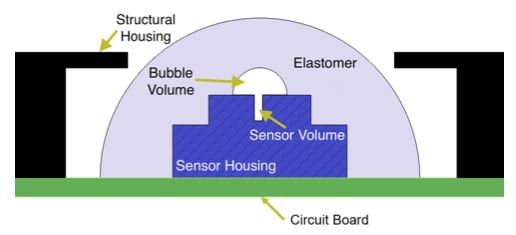
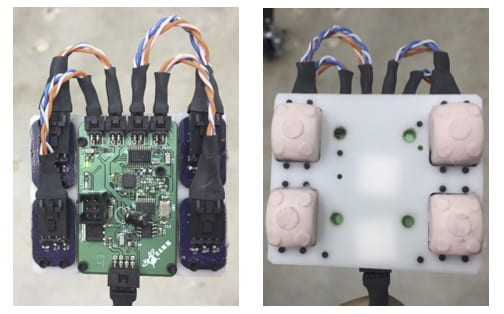
Ground contact sensors were developed based on rubber encapsulated pressure sensors. The operational principle of these sensors is to use an off-the-shelve barometric pressure sensor which is encased in rubber to detect contact through the deformation of the rubber. Critically, an air cavity is engineered between the elastomer and the pressure sensor to control the performance of this sensor. With minimal modifications, sensors can be manufactured to yield a desired sensitivity and maximum measurable contact force.

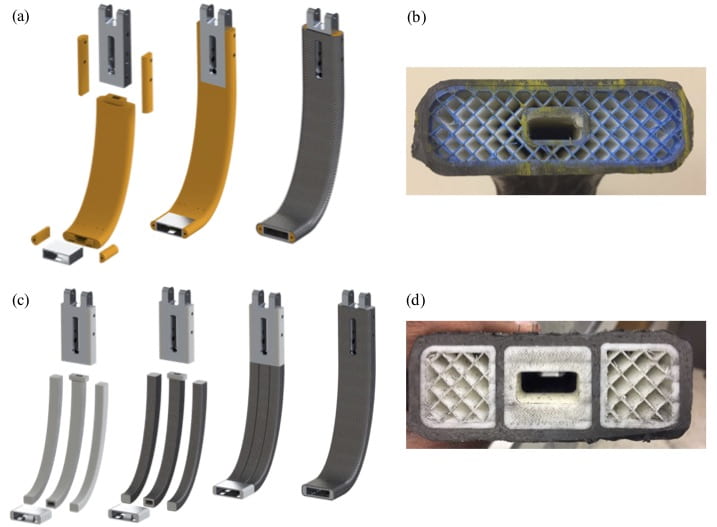
In order to enable rapid prototyping and testing of our robotic landing gear components, we developed a process for manufacturing CFRP components using 3D printed tooling. As shown in the image below, a 3D printed mandrel with CNC machined aluminum hard points is used to form the basis of our tool. A composite wet layup is performed using woven tubular carbon fiber cloths and subsequently vacuum bagged and heat cured. The resulting part can also include complex internal features, such as routing channels for electronic cables, at near zero added complexity.
Publications
León, B., Rimoli, J.J., and Di Leo, C.V., (2021) . “Ground and Flight Tests of an Unmanned Rotorcraft with Cable-Driven Robotic Landing Gear,” Journal of AHS, 66. [html]
León, B., Rimoli, J.J., and Di Leo, C.V., (2021) . “Rotorcraft Dynamic Platform Landings Using Robotic Landing Gear,” ASME Journal of Dynamic Systems, Measurement, and Control, 143(11). [html]
Di Leo, C.V., León B., Wachlin, J., Kurien, M., Krishnan, A., Krishnan, A., Rimoli, J.J., Costello M. (2020). “Design of a Crashworthy Cable-Driven Four-Bar Link Robotic Landing Gear System”. Journal of Aircraft, 57(2). [html]
León, B., Rimoli, J. J. , and Di Leo, C.V. (2019). “Ground and Flight Tests of a Cable-Driven Four-Bar Linkage Robotic Landing Gear for Rotorcraft,” Proceedings of the Vertical Flight Society’s Forum 75. 2019 Robert L. Lichten Award Recipient. [html]
Leon, B., Rimoli, J.J., Di Leo, C.V. (2019). “Elastomer Encapsulated Pressure Sensor With Engineered Air Cavity for Force Sensing”. IEEE Sensors, 19(16). [html]
Di Leo, C. V., Leon, B., Wachlin, J., Kurien, M., Rimoli, J. J., & Costello, M. (2018). “Cable-Driven Four-Bar Link Robotic Landing Gear Mechanism: Rapid Design and Survivability Testing.” In 2018 AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference (p. 0491). [html]
Patents
Di Leo, C.V., Costello, M.F., Leon, B., Rimoli, J.J., (October 2017) “Sensing Devices and Methods of Using Same.” Patent Pending (Filed). [html] Issued Notice of Allowance.
Di Leo, C.V., Costello, M.F., Leon, B., Rimoli, J.J., Ward, M.B., (September 2017) “Cable-Driven Four-Bar Link Leg Mechanism.” Patent Pending (Filed). [html]
Back to Research